defgetlineparam(line): """ For the line equation a*x+b*y+c=0, if we know two points(x1, y1)(x2,y2) in line, we can get a = y1 - y2 b = x2 - x1 c = x1*y2 - x2*y1 """ a = line.y1 - line.y2 b = line.x2 - line.x1 c = line.x1 * line.y2 - line.x2 * line.y1 return a,b,c
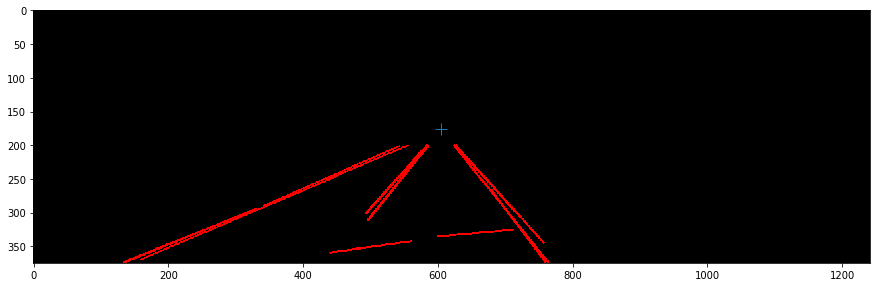
defgetcrosspoint(line1,line2): """ if we have two lines: a1*x + b1*y + c1 = 0 and a2*x + b2*y + c2 = 0, when d(= a1 * b2 - a2 * b1) is zero, then the two lines are coincident or parallel. The cross point is : x = (b1 * c2 - b2 * c1) / d y = (a2 * c1 - a1 * c2) / d """ a1, b1, c1 = getlineparam(line1) a2, b2, c2 = getlineparam(line2) d = a1 * b2 - a2 * b1 if d == 0: return np.inf, np.inf x = (b1 * c2 - b2 * c1) / d y = (a2 * c1 - a1 * c2) / d return x, y
classpointModel(Model): def__init__(self): self.params = None self.residual = 0 deffit(self, lines): lines = lines[:,0] X = [] Y = [] for i in range(len(lines)-1): line1 = Line(lines[i]) line2 = Line(lines[i+1]) x, y = getcrosspoint(line1, line2) X.append(x) Y.append(y) X = np.asarray(x).mean() Y = np.asarray(y).mean() self.params = [X, Y]
for i in range(len(lines)): line = Line(lines[i]) a, b, c = getlineparam(line) self.residual += abs(a*X + b*Y + c) / np.sqrt(a*a + b*b) defdistance(self, samplelines): dists = [] for line in samplelines: line = Line(line[0,:]) [x, y] = self.params a, b, c = getlineparam(line) dist = abs((a*x + b*y + c) / np.sqrt(a*a + b*b)) dists.append(dist) return np.asarray(dists)
defransac(lines, model, min_samples, min_inliers, iterations=100, eps=1, random_seed=42): """ Fits a model to observed data. Uses the RANSC iterative method of fitting a model to observed data. """ random.seed(random_seed) if len(lines) <= min_samples: raise ValueError("Not enough input lines to fit the model.") if0 < min_inliers and min_inliers < 1: min_inliers = int(min_inliers * len(lines)) best_params = None best_inliers = None best_residual = np.inf best_iteration = None for i in range(iterations): indices = list(range(len(lines))) random.shuffle(indices) inliers = np.asarray([lines[i] for i in indices[:min_samples]]) shuffled_lines = np.asarray([lines[i] for i in indices[min_samples:]]) try: model.fit(inliers) dists = model.distance(shuffled_lines) more_inliers = shuffled_lines[np.where(dists <= eps)[0]] inliers = np.concatenate((inliers, more_inliers)) if len(inliers) >= min_inliers: model.fit(inliers) if model.residual < best_residual: best_params = model.params best_inliers = inliers best_residual = model.residual best_iteration = i except ZeroDivisionError as e: print(e) if best_params isNone: raise ValueError("RANSAC failed to find a sufficiently good fit for the data.") else: return (best_params, best_inliers, best_residual, best_iteration)
应用
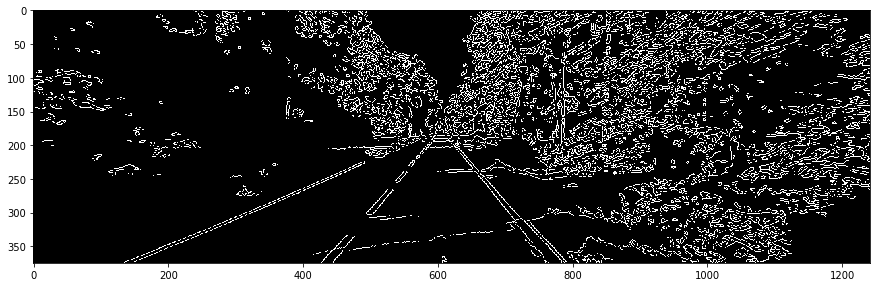
我们直接处理一张车道线图片
1 2 3 4 5 6 7 8 9
import matplotlib.image as mplimg import matplotlib.pyplot as plt import cv2 import numpy as np img = cv2.imread('1.png') plt.figure(figsize=(15,5)) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) plt.imshow(gray,cmap='gray') plt.show()
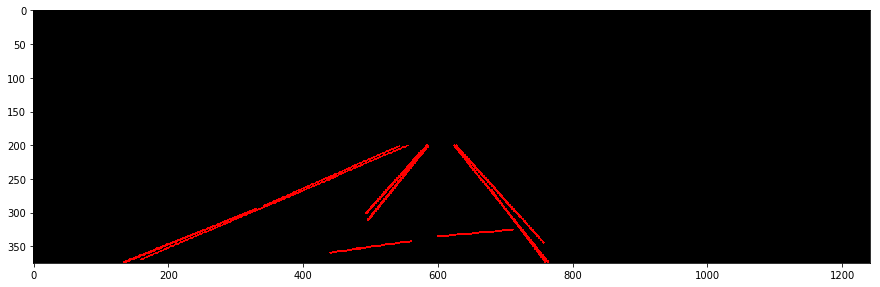
defdraw_lines(img, lines, color=[255, 0, 0], thickness=2): for line in lines: for x1, y1, x2, y2 in line: cv2.line(img, (x1, y1), (x2, y2), color, thickness)