在车道线检测当中,核心一步自然是的是抽取车道线的特征得到车道线检测的初步结果。实际操作中有很多方法,例如:
利用Canny算子或Sobel算子等做边缘检测
因为车道线主要是黄色或白色,可以利用不同的颜色空间(LAB、RGB、HSV等颜色空间),从颜色的值域中划分出车道线
车道线中心亮度比边缘都要高,因此可以利用 Hat-like Filter
…
以上方法大多利用车道线的低级别特征(low level feature),得到的结果需要利用Hough Transform、Ransac、sliding windows、band search等方法做进一步处理。
现在因为CNN在计算机视觉的惊人效果,所以也有人利用卷积神经网络得到 End-to-End 的车道线检测结果
利用神经网络语义分割–(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding
这里主要介绍 Hat-like Filter来对车道线进行low level processing。
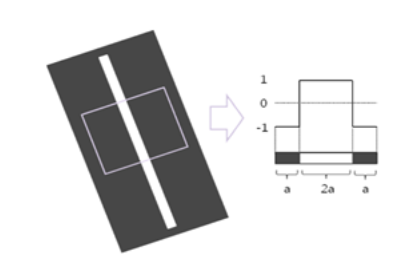
Hat-like Filter 也可以称为 Hat-shape Filter ,目的是利用车道线中心亮度比边缘都要高从鸟瞰图(bird’s view image)中过滤出我们想要的车道线[1]。车道线实际是边缘的一种,因此 Hat-like Filter 也是一种边缘检测方法。
Hat-like Filter 可以简单用下图表示:
对于鸟瞰图像中的每个像素,计算一个特殊值 b ( x , y ) b(x,y) b ( x , y ) b ( x − m , y ) b(x-m,y) b ( x − m , y ) b ( x + m , y ) b(x + m,y) b ( x + m , y )
B + m ( x , y ) = b ( x , y ) − b ( x + m , y ) B − m ( x , y ) = b ( x , y ) − b ( x − m , y ) \begin{matrix}
B_{+m}(x,y)=b(x,y)-b(x+m,y)\\
B_{-m}(x,y)=b(x,y)-b(x-m,y)
\end{matrix}
B + m ( x , y ) = b ( x , y ) − b ( x + m , y ) B − m ( x , y ) = b ( x , y ) − b ( x − m , y )
之后使用阈值对图像进行二值化处理:
\begin{matrix}
r(x,y)=\left \{
\begin{align*}
& 1, \mathrm{if}\; B_{+m} \geq 0, B_{-m} \geq 0 \;\mathrm{and} \; B_{+m}+B_{-m}\geq T\\
& 0,\mathrm{otherwise}
\end{align*}\right.
\end{matrix}
该边缘检测方法具有以下特性:
可以调整 m m m
车道线内的像素全部标记为边缘像素,这不同于基于梯度的边缘算子(例如Sobel、Canny),可以很好地提高了车道线检测的鲁棒性
不会检测到水平边缘
对一些渐变纹理也会加强(Weighted Hat-like Filter)
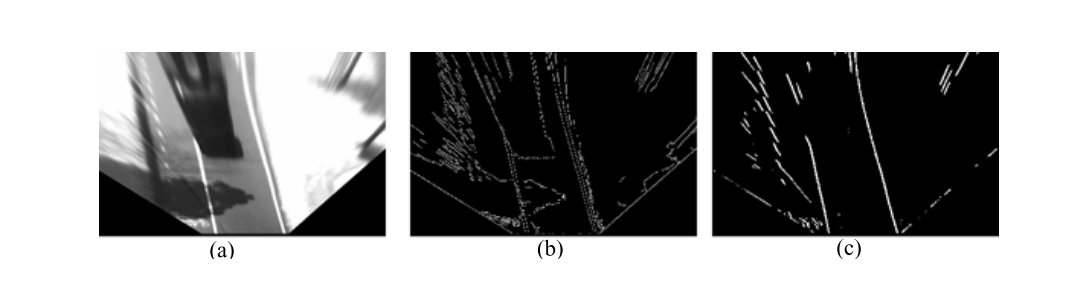
如图所示,Hat-like Filter的效果要比canny边缘检测要好。
I f I_f I f I g I_g I g
I f ( x , y ) = δ ( x , y ) ⋅ { 2 ⋅ B l o c k m i d d l e − B l o c k l e f t − B l o c k r i g h t } I_f(x,y)=\delta(x,y)\cdot \left \{ 2\cdot Block_{middle}- Block_{left}-Block_{right}\right \}
I f ( x , y ) = δ ( x , y ) ⋅ { 2 ⋅ B l o c k m i d d l e − B l o c k l e f t − B l o c k r i g h t }
其中
B l o c k m i d d l e = B l o c k ( x − w / 2 , y − h / 2 , w , h ) Block_{middle}= Block(x-w/2,y-h/2,w,h)
B l o c k m i d d l e = B l o c k ( x − w / 2 , y − h / 2 , w , h )
B l o c k l e f t = B l o c k ( x − 3 w / 2 , y − 3 h / 2 , w , h ) Block_{left}=Block(x-3w/2,y-3h/2,w,h)
B l o c k l e f t = B l o c k ( x − 3 w / 2 , y − 3 h / 2 , w , h )
B l o c k r i g h t = B l o c k ( x + w / 2 , y + h / 2 , w , h ) Block_{right}=Block(x+w/2, y+h/2, w,h)
B l o c k r i g h t = B l o c k ( x + w / 2 , y + h / 2 , w , h )
B l o c k ( x , y , w , h ) = ∑ ( r , c ) ∈ [ x , x + w ] × [ y , y + h ] I g ( r , c ) Block(x,y,w,h)=\sum_{(r,c)\in \left [ x,x+w \right ] \times \left [ y,y+h \right ]}{I_g(r,c)}
B l o c k ( x , y , w , h ) = ( r , c ) ∈ [ x , x + w ] × [ y , y + h ] ∑ I g ( r , c )
这里w和h表示该块的宽度和高度。由于车道线是长条形,所以Hat-like Filter可以加强车道线区域的响应。然而,同Hat-like Filter一样,渐变纹理也被加强,这会破坏之后的二值化结果并带来许多错误检测区域。
为了克服这个问题,我们为在 ( x , y ) (x, y) ( x , y ) δ ( x , y ) \delta(x,y) δ ( x , y )
\begin{matrix}
r(x,y)=\left\{
\begin{align*}
& 0, \mathrm{if} \; Block_{middle} < Block_{left}, \mathrm{or} \; Block_{middle} < Block_{right}\\
& 1,\mathrm{otherwise}
\end{align*}\right.
\end{matrix}
对于每个像素,如果 B l o c k m i d d l e Block_{middle} B l o c k m i d d l e B l o c k l e f t Block_{left} B l o c k l e f t B l o c k r i g h t Block_{right} B l o c k r i g h t
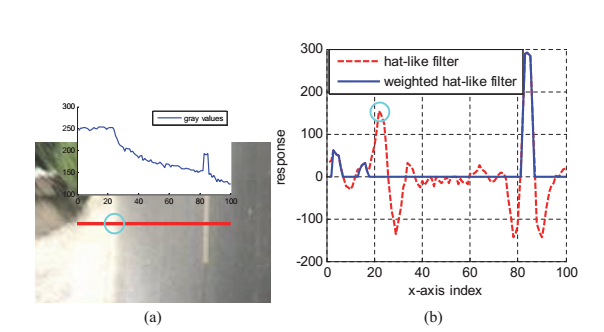
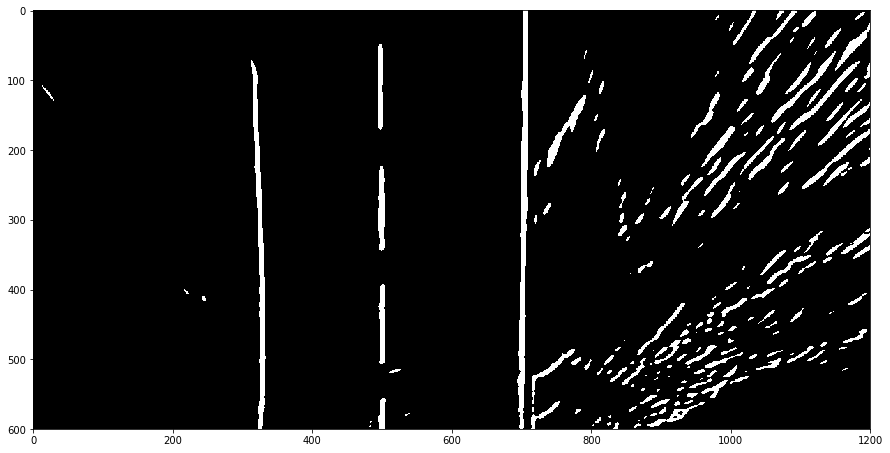
如下图所示,由绿色圆圈标记的像素属于渐变纹理。 使用Hat-like Filter,一些噪声的峰值被保留了下来,而我们的加权值可以显著抑制这一点。 从图中还可以看出,Weighted Hat-like Filter减少了大量的错误检测。之后进行二值化等进一步操作。
这里注意到[2]中的 Weighted Hat-like Filter 是一个方向的,我们可以通过加入与另一个方向的与and 操作,这样的效果会更加明显。
加载图片,并转为灰度图
1 2 3 4 5 6 7 8 9 import matplotlib.image as mplimgimport matplotlib.pyplot as pltimport cv2import numpy as npimg = cv2.imread('1.png' ) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) plt.figure(figsize=(15 ,10 )) plt.imshow(gray,cmap='gray' ) plt.show()
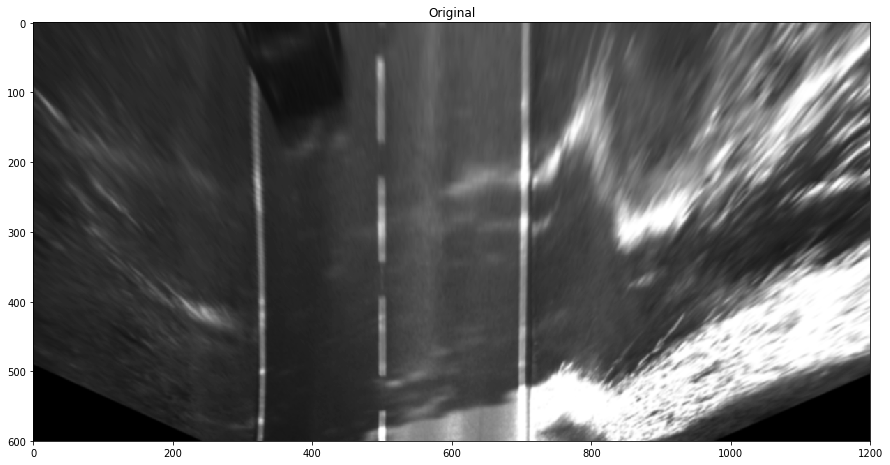
利用IPM,计算出转换矩阵,并将图片转为鸟瞰图(Bird’s view image)
1 2 3 4 5 6 7 8 9 10 11 img_size = (1200 , 600 ) blur_ksize = 5 src = np.float32([[435 , 375 ],[775 , 375 ],[500 , 300 ],[710 , 300 ]]) dst = np.float32([[500 , 600 ],[700 , 600 ],[500 , 500 ],[700 , 500 ]]) M = cv2.getPerspectiveTransform(src, dst) warped = cv2.warpPerspective(gray, M, img_size) warped = cv2.GaussianBlur(warped, (blur_ksize, blur_ksize), 0 , 0 ) plt.figure(figsize=(15 ,10 )) plt.title('Original' ) plt.imshow(warped,cmap='gray' ) plt.show()
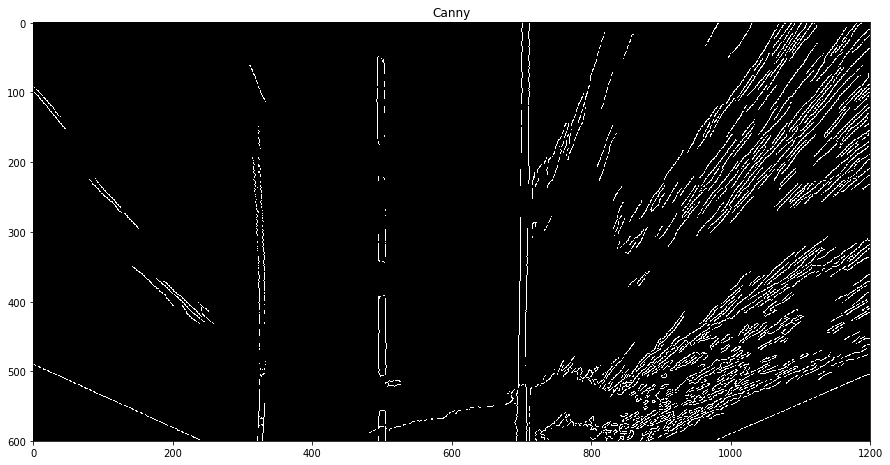
Canny边缘检测
1 2 3 4 5 6 7 low_threshold = 50 high_threshold = 120 canny = cv2.Canny(warped, low_threshold, high_threshold) plt.figure(figsize=(15 ,10 )) plt.title('Canny' ) plt.imshow(canny,cmap = 'gray' ) plt.show()
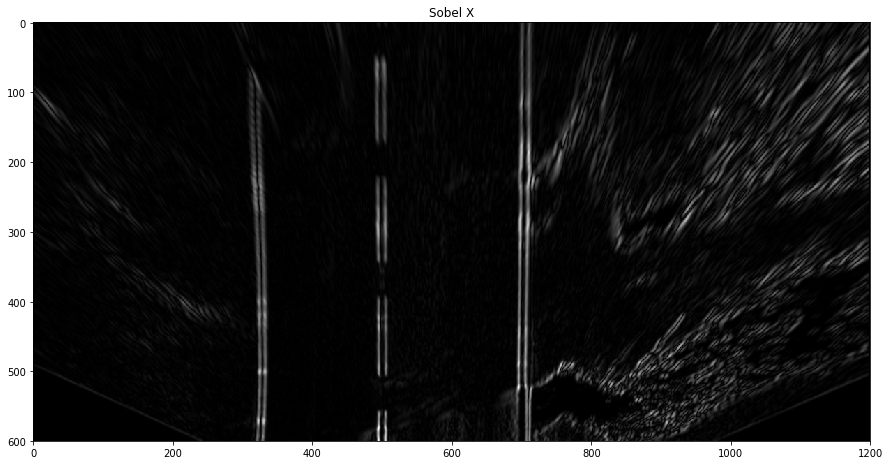
Sobel算子 ,这里使用的是x方向
1 2 3 4 5 6 7 8 9 10 sobelx = cv2.Sobel(warped,cv2.CV_16S,1 ,0 ,ksize=5 ) sobely = cv2.Sobel(warped,cv2.CV_16S,0 ,1 ,ksize=5 ) sobelx = np.absolute(sobelx) sobely = np.absolute(sobely) plt.figure(figsize=(15 ,10 )) plt.imshow(sobelx,cmap = 'gray' ) plt.title('Sobel X' ) plt.show()
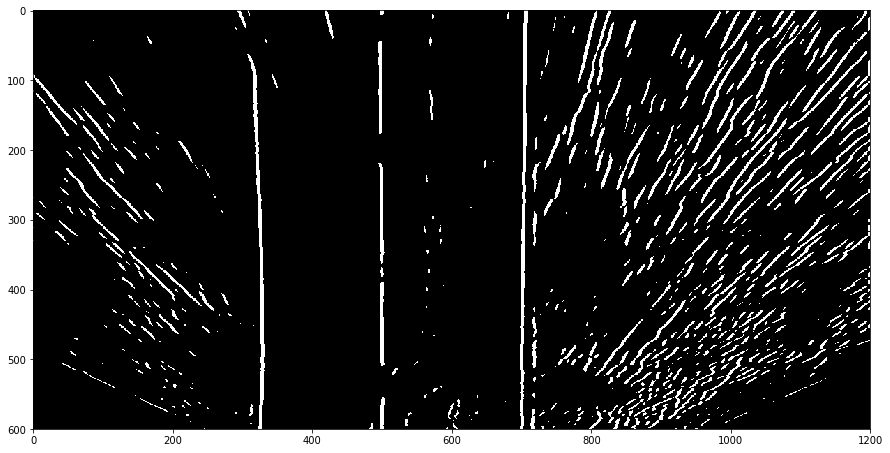
Hat-like Filter
这里实现的比较繁琐,已经经过了二值化处理
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 def hat_like (img, m, T) : left_mat = np.ones((1 , m)) * -1 right_mat = np.ones((1 , m)) * -1 center_mat = np.ones((1 , m)) conv_mat1 = np.column_stack((left_mat, center_mat, np.zeros((1 , m)))) conv_mat2 = np.column_stack((np.zeros((1 , m)), center_mat, right_mat)) conv1 = cv2.filter2D(img, cv2.CV_16S, conv_mat1) conv2 = cv2.filter2D(img, cv2.CV_16S, conv_mat2) conv1[conv1<0 ]=0 conv2[conv2<0 ]=0 res = np.logical_and(conv1,conv2) conv_mat3 = np.column_stack((left_mat, center_mat*2 , right_mat)) conv3 = cv2.filter2D(img, cv2.CV_16S, conv_mat3) conv3[conv3<T]=0 res = np.logical_and(res,conv3) res[res<0 ]=0 return res plt.figure(figsize=(15 ,10 )) plt.imshow(hat_like_conv_y(warped, 5 , 50 ), cmap='gray' ) plt.show()
Weighted Hat-like Filter
因为车道线检测中,对于图片边缘是可以忽视的,这里没有对图片边缘的卷积做太多处理。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 def weighted_hat_like_conv (img, w, h, T) : left_upper_mat = np.ones((h, w)) * -1 right_bottom_mat = np.ones((h, w)) * -1 center_mat = np.ones((h, w)) * 2 top = np.column_stack((left_upper_mat, np.zeros((h,w*2 )))) middle = np.column_stack((np.zeros((h,w)), center_mat, np.zeros((h, w)))) bottom = np.column_stack((np.zeros((h,w*2 )), right_bottom_mat)) conv_mat = np.row_stack((top, middle, bottom)) res = cv2.filter2D(img, cv2.CV_16S, conv_mat) res[res<=T] = 0 res[res>T] = 1 return res plt.figure(figsize=(15 ,10 )) plt.imshow(weighted_hat_like_conv(warped, 7 , 3 , 1000 ), cmap='gray' ) plt.show()
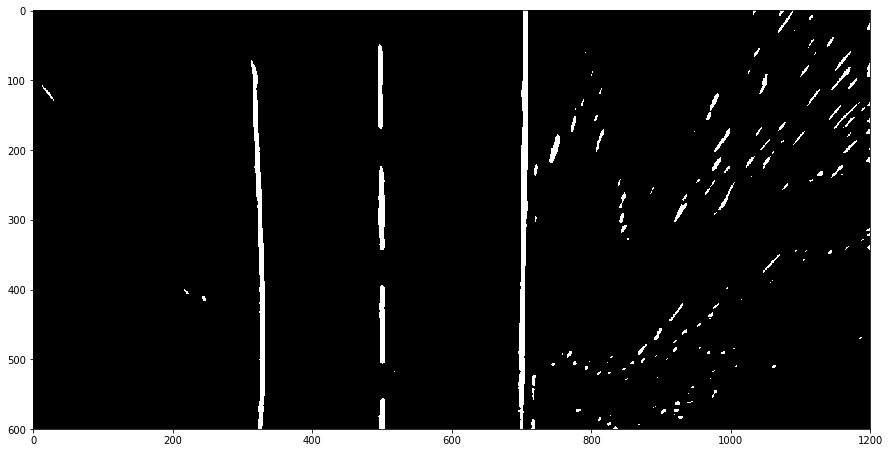
两方向相与的Weighted Hat-like Filter
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 def weighted_hat_like_conv_and (img, w, h, T) : left_upper_mat = np.ones((h, w)) * -1 right_bottom_mat = np.ones((h, w)) * -1 center_mat = np.ones((h, w)) * 2 top = np.column_stack((left_upper_mat, np.zeros((h,w*2 )))) middle = np.column_stack((np.zeros((h,w)), center_mat, np.zeros((h, w)))) bottom = np.column_stack((np.zeros((h,w*2 )), right_bottom_mat)) conv_mat1 = np.row_stack((top, middle, bottom)) conv_mat2 = np.row_stack((bottom, middle, top)) res1 = cv2.filter2D(img, cv2.CV_16S, conv_mat1) res1[res1 < T] = 0 res2 = cv2.filter2D(img, cv2.CV_16S, conv_mat2) res2[res2 < T] = 0 res = np.logical_and(res1, res2) return res plt.figure(figsize=(15 ,10 )) plt.imshow(weighted_hat_like_conv_and(warped, 7 , 3 , 1000 ), cmap='gray' ) plt.show()
[1] R. Jiang, M. Terauchi, R. Klette, S. Wang, and T. Vaudrey, “Low-Level Image Processing for Lane Detection and Tracking,” in Arts and Technology , vol. 30, F. Huang and R.-C. Wang, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 2010, pp. 190–197.
[2] Bei He, Rui Ai, Yang Yan, and Xianpeng Lang, “Accurate and robust lane detection based on Dual-View Convolutional Neutral Network,” 2016, pp. 1041–1046.